Earth Observation Mission CFI Software Lib Software User Manual for JAVA |
Earth Observation Mission CFI Software Lib Software User Manual for JAVA |
Base class for StateVector objects. More...
Public Member Functions | |
| StateVector () | |
| Class constructor (empty constructor). | |
| StateVector (Time timeIn, Coord coordIn) | |
| Class constructor. | |
| native StateVector | change (ModelId modelId, long deriv, long newCS) throws CfiError |
| Change coordinate system. | |
| native void | setSun (ModelId modelId, Time time) throws CfiError |
| Set Sun state vector. | |
| native void | setMoon (ModelId modelId, Time time) throws CfiError |
| Set Moon state vector. | |
| native void | setPlanet (ModelId modelId, Time time, long planet) throws CfiError |
| Set state vector for the requested planet. | |
| native OrbitPos | getPositionOnOrbit (ModelId modelId, long angleType, long deriv) throws CfiError |
| Get the true latitude corresponding to the state vector. | |
Public Attributes | |
| Time | time |
| Time object. | |
| Coord | coord |
| Coordinates. | |
Base class for StateVector objects.
| EECFI.StateVector.StateVector | ( | ) |
Class constructor (empty constructor).
Class constructor.
| time | Time of the state vector. | |
| coord | Coordinates. |
| StateVector EECFI.StateVector::change | ( | ModelId | modelId, | |
| long | deriv, | |||
| long | newCS | |||
| ) | throws CfiError |
Change coordinate system.
This method transforms a cartesian state vector between different reference frames. The transformation are done sequentially following the schema in next figure:
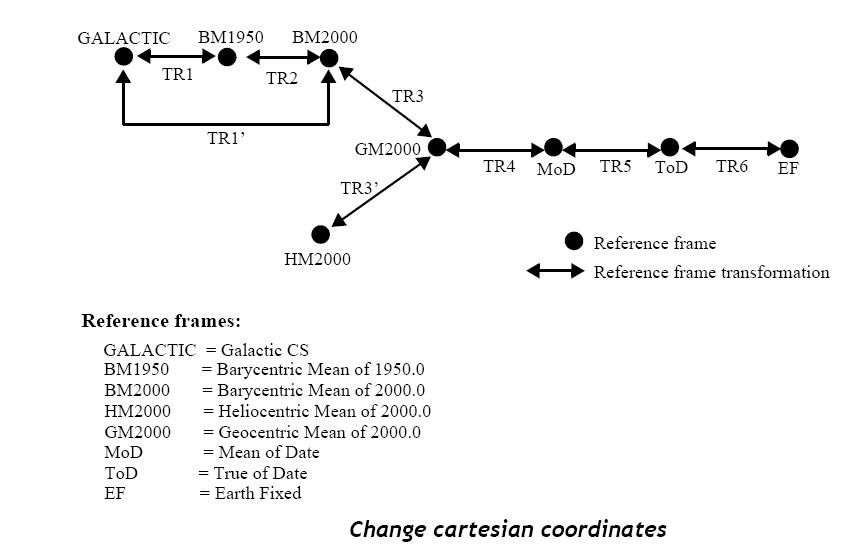
. Time attribute Time must have time correlations initialized. Note that the transformations between BM2000, HM2000 and GM2000 involve a translation of the input vectors (TR3 and TR3’). In case that the input vector is a direction and not a location, the transformation should only apply the rotations between frames, so the transformation should be done in several steps with StateVector.change, skipping the translations.
Permitted CS = XLCFI_CS_GALACTIC, XLCFI_CS_BM1950, XLCFI_CS_BM2000, XLCFI_CS_HM2000, XLCFI_CS_GM2000, XLCFI_CS_MOD, XLCFI_CS_TOD or XLCFI_CS_EF.
| modelId | Model Id. | |
| deriv | derivative to be computed (XLCFI_NO_DER or XLCFI_1ST_DER). | |
| newCS | New coordinate frame (CoordinateSystemEnum). |
| OrbitPos EECFI.StateVector::getPositionOnOrbit | ( | ModelId | modelId, | |
| long | angleType, | |||
| long | deriv | |||
| ) | throws CfiError |
Get the true latitude corresponding to the state vector.
Get the true/mean latitude describing the position on the orbit. The latitude angle is the angle between the satellite position and the intersection of the orbital plane with a given reference plane. Asumption: the state vector is given in EF.
COMPATIBILITY NOTE: The output of this function is consistent with the calculation of orbit number and time from ANX within the EO CFI only when the required angle type is compliant with [EO_OPS] and [MCD] i.e. either ToD or EF.
| modelId | Model Id. | |
| angleType | Type of angle(AngleTypeEnum). It defines the reference plane. | |
| deriv | Derivative (DerivEnum). |
Set Moon state vector.
It is computed the position and velocity in EF CS.
| modelId | Model id. | |
| time | Requested time. |
Set state vector for the requested planet.
It is computed the position and velocity in EF CS.
| modelId | Model id. | |
| time | requested time. | |
| planet | (PlanetEnum). |
Set Sun state vector.
It is computed the position and velocity in EF CS.
| modelId | Model id. | |
| time | Requested time. |
Coordinates.
Time object.
 1.7.1
1.7.1